



♦ 優れた精密加工技術と独自の巻線技術により高出力と制御性を実現した小型・高性能シリーズのコアレスモーターです。
♦ 従来のφ12~ 17.55 シリーズから、より幅広い用途にご使用頂けるようφ10、φ21、φ24のコアレスモーターを新たに開発しました。
♦ コアードモーターに比べ、原理的にロータ慣性モーメントが小さいため、応答性が優れています。また、コギングが無いため振動・騒音も小さく、制御性の高い小型コアレスモーターです。
♦ 磁気式・光学式のロータリーエンコーダ、各種減速機との多彩な組合せが可能なコアレスモーターです。
♦ 優れた精密加工技術と独自の巻線技術により高出力と制御性を実現した小型・高性能シリーズのコアレスモーターです。
|
|
|
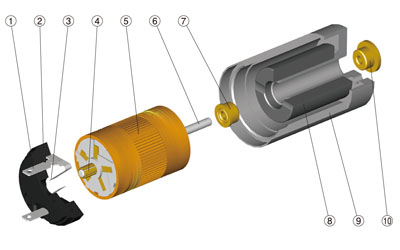
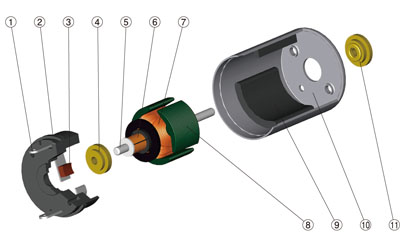
コアレスモーター (1) 端子 (2) ブラシ台 (3) ブラシ (4) コミュテータ (5) コイル (6) シャフト (7) ベアリング (8) マグネット (9) ハウジング (10) ベアリング |
|
|
コアードモーター (1) 端子 (2) ブラシ台 (3) ブラシ (4) ベアリング (5) シャフト (6) コミュテータ (7) コイル (8) 鉄芯 (9) マグネット (10) ハウジング (11) ベアリング |
|
♦ 定格電圧【V】
定格負荷・定格回転数で運転させるのに必要な電圧です。(モーター端子間に印加した際の電圧) 定格電圧は表示されている電圧の±10%以内でご使用下さい。(範囲外でご使用の場合にはご相談下さい)
♦ 無負荷回転数【min-1】
無負荷状態で、定格電圧にて運転した時の回転数。
♦ 無負荷電流【mA】
無負荷状態で、定格電圧にて運転した時の電流値。
♦ 起動トルク【mNm】
定格電圧を印加した時に発生する最大トルク。
♦ 起動電流【mA】
定格電圧において、起動時やロック時に流れる最大の電流。
♦ 出力【W】
モーターの出力は、次の式で得られます。
♦ 最大効率【%】
入力と出力の入力と出力の比率における最大値。
♦ 端子間抵抗【Ω】
巻線、ブラシとコミュテータ間、端子又はリード線に於ける抵抗で、モーターの端子間で測定した時に得られる値。グラファイトブラシの場合、電流により変化します。
♦ ロータ慣性モーメント【gcm2】
ロータ(回転子)に於ける慣性モーメント
♦ ロータインダクタンス【mH】
測定周波数1kHzに於いて、モーター端子間で測定される概略値。
♦ トルク定数【mNm/A】
電流1Aの時に発生するトルク。
定格負荷・定格回転数で運転させるのに必要な電圧です。(モーター端子間に印加した際の電圧) 定格電圧は表示されている電圧の±10%以内でご使用下さい。(範囲外でご使用の場合にはご相談下さい)
♦ 無負荷回転数【min-1】
無負荷状態で、定格電圧にて運転した時の回転数。
♦ 無負荷電流【mA】
無負荷状態で、定格電圧にて運転した時の電流値。
♦ 起動トルク【mNm】
定格電圧を印加した時に発生する最大トルク。
♦ 起動電流【mA】
定格電圧において、起動時やロック時に流れる最大の電流。
♦ 出力【W】
モーターの出力は、次の式で得られます。
♦ 最大効率【%】
入力と出力の入力と出力の比率における最大値。
♦ 端子間抵抗【Ω】
巻線、ブラシとコミュテータ間、端子又はリード線に於ける抵抗で、モーターの端子間で測定した時に得られる値。グラファイトブラシの場合、電流により変化します。
♦ ロータ慣性モーメント【gcm2】
ロータ(回転子)に於ける慣性モーメント
♦ ロータインダクタンス【mH】
測定周波数1kHzに於いて、モーター端子間で測定される概略値。
|
♦ 機械的時定数【ms】 モーターが静止状態から立上がり、無負荷回転数の63.2%に達するまでの時間を表す定数。(tm) |
|
電流1Aの時に発生するトルク。
|
♦ 巻線許容温度【℃】 コアレスモーターの巻線には、絶縁耐熱B種(130℃)を使用しています。特殊な耐熱仕様が必要な場合はお問い合わせください。 |

|