


| 磁式旋转编码器 |
光学式旋转编码器 |
|
♦以“超小型和高功能”为概念,安装有独家技术开发的MR传感器和ASIC的磁式旋转编码器(MR-13,MR-16) ♦通过把MR传感器检测出的信号在ASIC递倍增幅,可以进行范围广泛分解能选择的磁式旋转编码器(MR-13,MR-16) ♦采用与电机一体化的设计,虽然超小型,但是具备3频道,高分辨力,线驱动器输出的磁式旋转编码器(MR-13,MR-16) ♦可以与无芯电机进行多种组合的磁式旋转编码器 |
♦带有受光和光元件,编码轮的反射式旋转编码器 ♦光学式旋转编码器由于是光学方式,所以,在磁界环境中也可以使用 |
| 旋转编码器型式 | 磁式 | 光学式 | ||
| MH-10 | MR-13 | MR-16 | ME-16 | |
| 外直径 | f10 | f13 | f16 | f16 |
| 频道 | 2CH (A,B) | 3CH (A,B,Z) | 3CH (A,B,Z) | 2CH (A,B) |
| 分辨力 | 12 P/R | 32-256 P/R | 64-512 P/R | 75-200 P/R |
| 反应频率 | 20 kHz | max.80 kHz | max.160 kHz | 60 kHz |
| 输出信号 | TTL | Line Driver (TTL) | Line Driver (TTL) | TTL |
|
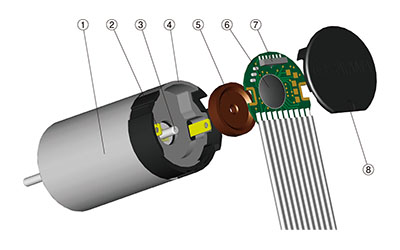
磁式旋转编码器 (1) 电机 (2) 电机端子 (3) 电机传动轴 (4) 磁屏蔽 (5) 磁轮 (6) ASIC (7) MR传感器 (8) 盖帽 |
|
|
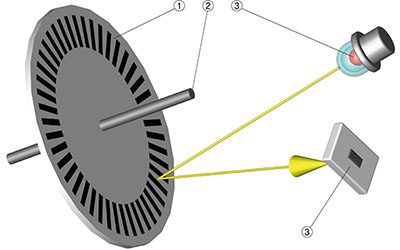
光学式旋转编码器 (1) 编码轮 (2) 电机传动轴 (3) 发光元件 (4) 受光元件 |
|
♦ 增量
根据编码器的旋转量,输出脉冲信号。通过计数任意基准位置起算的脉冲数,能够检测出旋转量。同时,可以通过A,B 相的位相差(快,慢),检测出旋转方向。
♦ MR(磁阻)传感器
根据磁界强度的变化,电阻值发生变化。MR磁阻传感器利用了磁阻(MR)元件。
♦ 分辨力(P/R)
在电机轴转1圈时间里输出的旋转编码器信号的脉冲数。分辨力越高,可以进行越细微的控制。
♦ ASIC
是为CITIZEN MICRO的MR磁阻编码器专门设计的ASIC(特制IC),虽然超小型,但具备了3相,线驱动器,高分辨力,进而提高了旋转编码器的性能。
♦ 输出信号
A相 : 只输出分辨力的数字的矩形波信号
B相 : 与A相有位相差的信号,可以根据快慢检测出旋转的方向。
Z相 : 1旋转输出1脉冲(检测基准点用)
♦ 最大反应频率
旋转编码器每1秒能够反应的最大的信号,在最大转数,分辨力,最大反应频率之间,有下面公式的关系。
根据编码器的旋转量,输出脉冲信号。通过计数任意基准位置起算的脉冲数,能够检测出旋转量。同时,可以通过A,B 相的位相差(快,慢),检测出旋转方向。
♦ MR(磁阻)传感器
根据磁界强度的变化,电阻值发生变化。MR磁阻传感器利用了磁阻(MR)元件。
♦ 分辨力(P/R)
在电机轴转1圈时间里输出的旋转编码器信号的脉冲数。分辨力越高,可以进行越细微的控制。
♦ ASIC
是为CITIZEN MICRO的MR磁阻编码器专门设计的ASIC(特制IC),虽然超小型,但具备了3相,线驱动器,高分辨力,进而提高了旋转编码器的性能。
♦ 输出信号
A相 : 只输出分辨力的数字的矩形波信号
B相 : 与A相有位相差的信号,可以根据快慢检测出旋转的方向。
Z相 : 1旋转输出1脉冲(检测基准点用)
♦ 最大反应频率
旋转编码器每1秒能够反应的最大的信号,在最大转数,分辨力,最大反应频率之间,有下面公式的关系。
|
♦ TTL TTL:Transistor Transistor Logic(晶体管-晶体管逻辑) High(2.4V以上),Low(0.4V以下)的矩形波输出。 |
|
|
♦ 线驱动器 由于输出与各输出有180 度位相差的2个信号(差动输出),所以,可以降低噪音造成的障碍。 |
|