




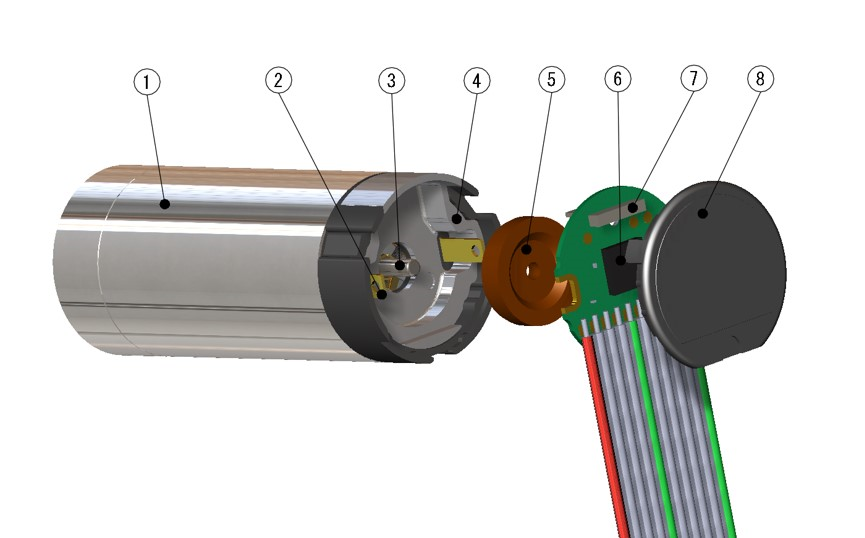
- ① コアレスモータ
- ② モータ端子
- ③ モータシャフト
- ④ 磁気シールド
- ⑤ 磁気ホイール
- ⑥ IC
- ⑦ MRセンサ
- ⑧ キャップ
磁気式ロータリーエンコーダ
『超小型(φ13、16)、高性能』をコンセプトとして、独自技術により開発されたMRセンサで検出された信号をICで逓倍する事により、幅広い分解能の選択を可能とした磁気式ロータリーエンコーダ。モータと一体化設計にする事で、超小型ながら3チャンネル、高分解能、電圧差動出力を実現(MR-13、MR-16)。
Φ13、16、17のコアレスモータとの組合わせが可能です。
超小型(φ8、10、13)、2チャンネル、低パルスを特長とし、リード線をアキシャル方向に出すことで、顧客が設計される筐体のダウンサイジング化を可能とした磁気式ロータリーエンコーダ(MR-8、MH-10、MRS13)φ8、10、13のコアレスモータとの組合わせが可能。従来のφ8、10シリーズからより幅広い用途にご使用頂けるようφ8の磁気式エンコーダを新たに開発しました。
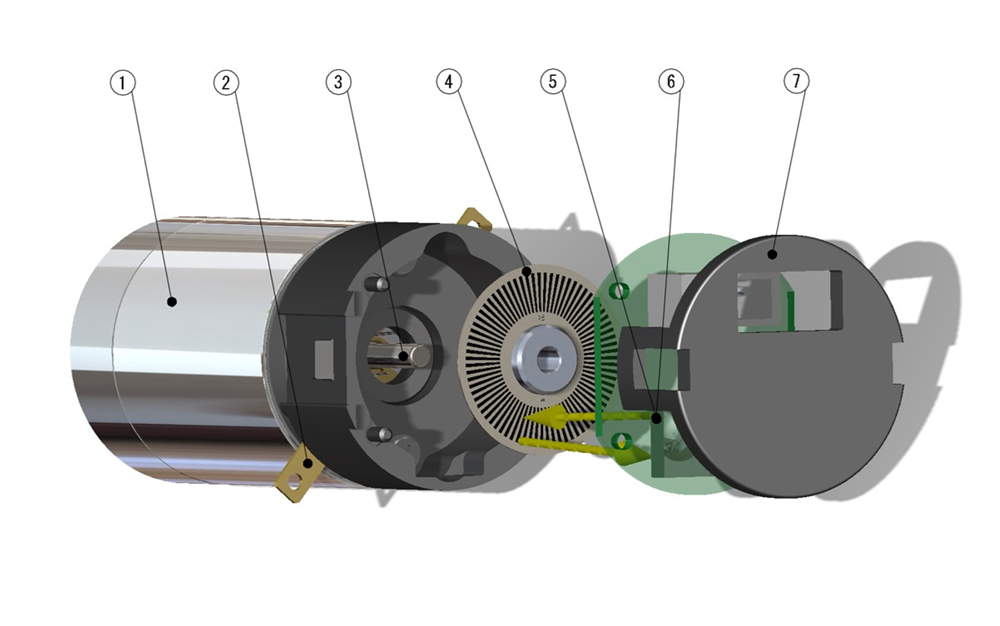
光学式ロータリーエンコーダ
受光・発光素子、コードホイールを搭載した反射式を採用し、リード線をアキシャル方向に出すことで、顧客が設計される筐体のダウンサイジング化を可能としたロータリーエンコーダ。光学式のため磁界環境においても使用可能(MK-16)。φ16より大きなサイズのコアレスモータと組合せる事が可能です。
High(2.4V以上)、Low(0.4V以下)の矩形波で出力されます。
| 型式 | 磁気式 Magnetic | 光学式 Optical | ||||
|---|---|---|---|---|---|---|
| MR-8 | MH-10 | MR-13 | MRS-13 | MR-16 | MK-16 | |
| 外径 | φ8 | φ10 | φ13 | φ13 | φ16 | φ16 |
| チャンネル | 2ch (A,B) | 2ch (A,B) | 3ch (A,B,Z) | 2ch (A,B) | 3ch (A,B,Z) | 2ch (A,B) |
| 分解能 | 12P/R | 12P/R | 32~256P/R | 16P/R | 64~512P/R | 36~200P/R |
| 最大応答周波数 | 20kHz | 20kHz | 80kHz | 20kHz | 160kHz | 30,60kHz |
| 出力信号 | TTL Compatible | TTL Compatible | Voltage differential TTL Compatible |
Voltage differential TTL Compatible |
TTL Compatible | TTL Compatible |
磁気式ロータリーエンコーダ
光学式ロータリーエンコーダ
- ① モータ
- ② モータ端子
- ③ モータシャフト
- ④ コードホイール
- ⑤ 発光素子
- ⑥ 受光素子
- ⑦ キャップ
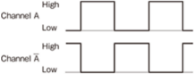
インクリメンタル
ロータリーエンコーダの回転量に応じたパルス信号を出力します。任意の基準位置からのパルス数をカウントする事により回転量を検出できます。また、A、B相の位相差(進み、遅れ)により、回転方向を検出することが可能です。
MR(磁気式-Resistance)センサ
磁界強度の変化に応じて抵抗値が変化する磁気抵抗(MR)素子を利用したセンサです。
分解能(P/R)
モータ軸を1回転させる間に出力されるロータリーエンコーダ信号のパルス数で、分解能が高いほど細かな制御が可能になります。
出力信号
A相 分解能の数だけ出力される矩形波信号
B相 A相と位相差がある信号で、進み、遅れにより回転方向を検出することが可能です。
Z相 1回転に1パルス出力(原点検出用)
最大応答周波数
ロータリーエンコーダが1秒あたりに応答できる最大の信号で、最大回転数、分解能、最大応答周波数の間には次式の関係があります。

TTL

TTL:Transistor Transistor Logic
High(2.4V以上)、Low(0.4V以下)の矩形波で出力されます。
電圧差動
各出力と180度位相差を持った2つの信号が出力される(差動出力)のため、ノイズによる障害を低減させる事が可能です。
High(2.4V以上)、Low(0.4V以下)の矩形波で出力されます。