



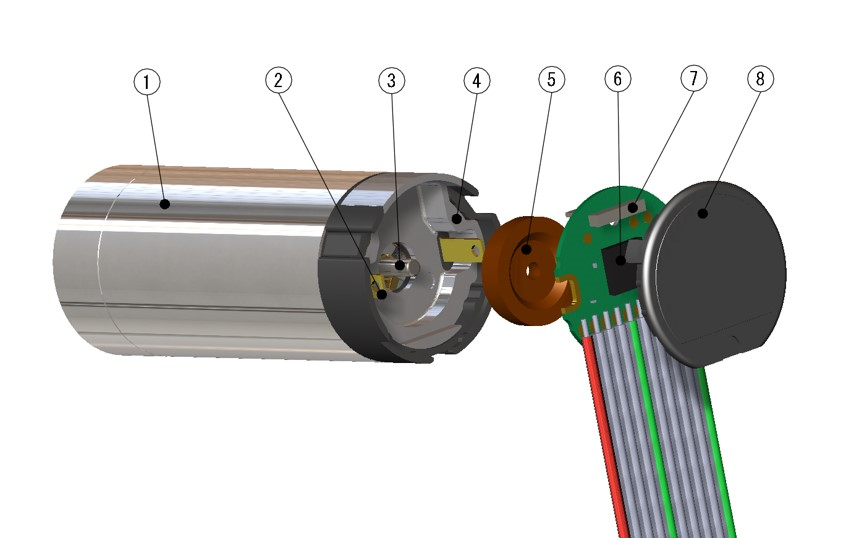
- ① 电机
- ② 电机端子
- ③ 电机传动轴
- ④ 磁屏蔽
- ⑤ 磁轮
- ⑥ IC
- ⑦ MR传感器
- ⑧ 盖帽
磁式旋转编码器
以“超小型(φ13、16)、高性能”為概念,並運用透過獨特技術所開發的MR傳感器所檢測到的信號與IC相乘,藉此可進行分辨廣泛分解能的磁氣式轉旋轉編碼器。 透過和电机一體化設計,除了超小型(MR-13、MR-16),同時也實現3通道、高分解能和電壓差動輸出的效果。
可以和Φ13、16、17的直流空心电机做搭配。
具有超小型(φ8、10、13)、雙通道、低脈衝的特色,並透過沿軸向延伸引線,藉此縮小將客戶的設計框體的磁氣式旋轉編碼器(MR-8、MH-10、MRS13)可搭配φ8、10、13直流空芯馬達。新開發的 φ8 磁性編碼器,比傳統的 φ8 和 10 系列能有更廣泛的用途。
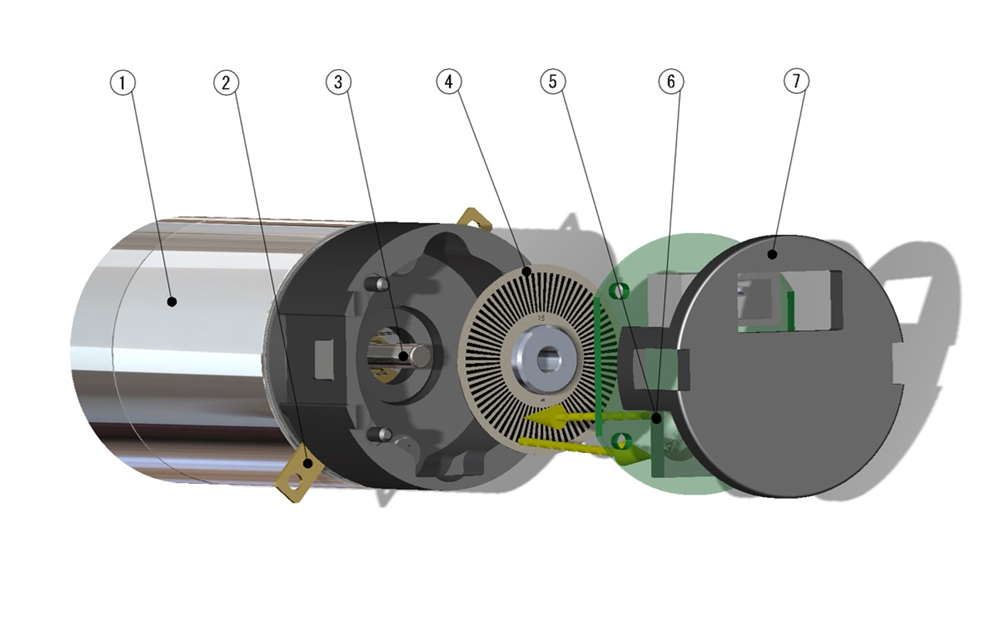
光学式旋转编码器
採用搭載受光/發光元件和繩輪的反射式,並將引線沿軸延伸,藉此實現客戶的設計框體小型化的旋轉編碼器。因是光學式,因此在磁場環境中也可以使用(MK-16)。
可與φ16以上的無芯电机進行組合。
| 旋转编码器型式 | Model | 磁式 | 光学式 | ||||
|---|---|---|---|---|---|---|---|
| MR-8 | MH-10 | MR-13 | MRS-13 | MR-16 | MK-16 | ||
| 外直径 | Diameter | φ8 | φ10 | φ13 | φ13 | φ16 | φ16 |
| 频道 | Channel | 2ch (A,B) | 2ch (A,B) | 3ch (A,B,Z) | 2ch (A,B) | 3ch (A,B,Z) | 2ch (A,B) |
| 分辨力 | Resolution | 12P/R | 12P/R | 32~256P/R | 16P/R | 64~512P/R | 36~200P/R |
| 反应频率 | Maximum response frequency | 20kHz | 20kHz | 80kHz | 20kHz | 160kHz | 30,60kHz |
| 输出信号 | Output signal | TTL Compatible | TTL Compatible | Voltage differential TTL Compatible |
Voltage differential TTL Compatible |
TTL Compatible | TTL Compatible |
磁式旋转编码器
光学式旋转编码器
- ① 电机
- ② 电机端子
- ③ 电机传动轴
- ④ 编码轮
- ⑤ 发光元件
- ⑥ 受光元件
- ⑦ 盖帽
增量
根据编码器的旋转量,输出脉冲信号。通过计数任意基准位置起算的脉冲数,能够检测出旋转量。同时,可以通过A,B 相的位相差(快,慢),检测出旋转方向。
MR(磁阻)传感器
根据磁界强度的变化,电阻值发生变化。MR磁阻传感器利用了磁阻(MR)元件。
分辨力(P/R)
在电机轴转1圈时间里输出的旋转编码器信号的脉冲数。分辨力越高,可以进行越细微的控制。
Output signal
A相 只输出分辨力的数字的矩形波信号
B相 与A相有位相差的信号,可以根据快慢检测出旋转的方向。
Z相 1旋转输出1脉冲(检测基准点用)
最大反应频率
旋转编码器每1秒能够反应的最大的信号,在最大转数,分辨力,最大反应频率之间,有下面公式的关系。

TTL

TTL:Transistor Transistor Logic(晶体管-晶体管逻辑)
High(2.4V以上),Low(0.4V以下)的矩形波输出。
電壓差動

由于输出与各输出有180 度位相差的2个信号(差动输出),所以,可以降低噪音造成的障碍。